Kawasaki Corleo: Reitbarer Roboterlöwe mit Wasserstoffmotor als Zukunftsvision Vierbeiniger Elektroantrieb, 150ccm-Wasserstoffmotor, bis 100 km/h
Kawasaki stellt mit dem Corleo einen reitbaren Roboter mit Wasserstoffmotor und KI-Steuerung vor. Vierbeiniger Antrieb, futuristische Bedienung und Tierdesign treffen auf viele technische Unbekannte und ein realistisches Ziel: frühestens 2050.

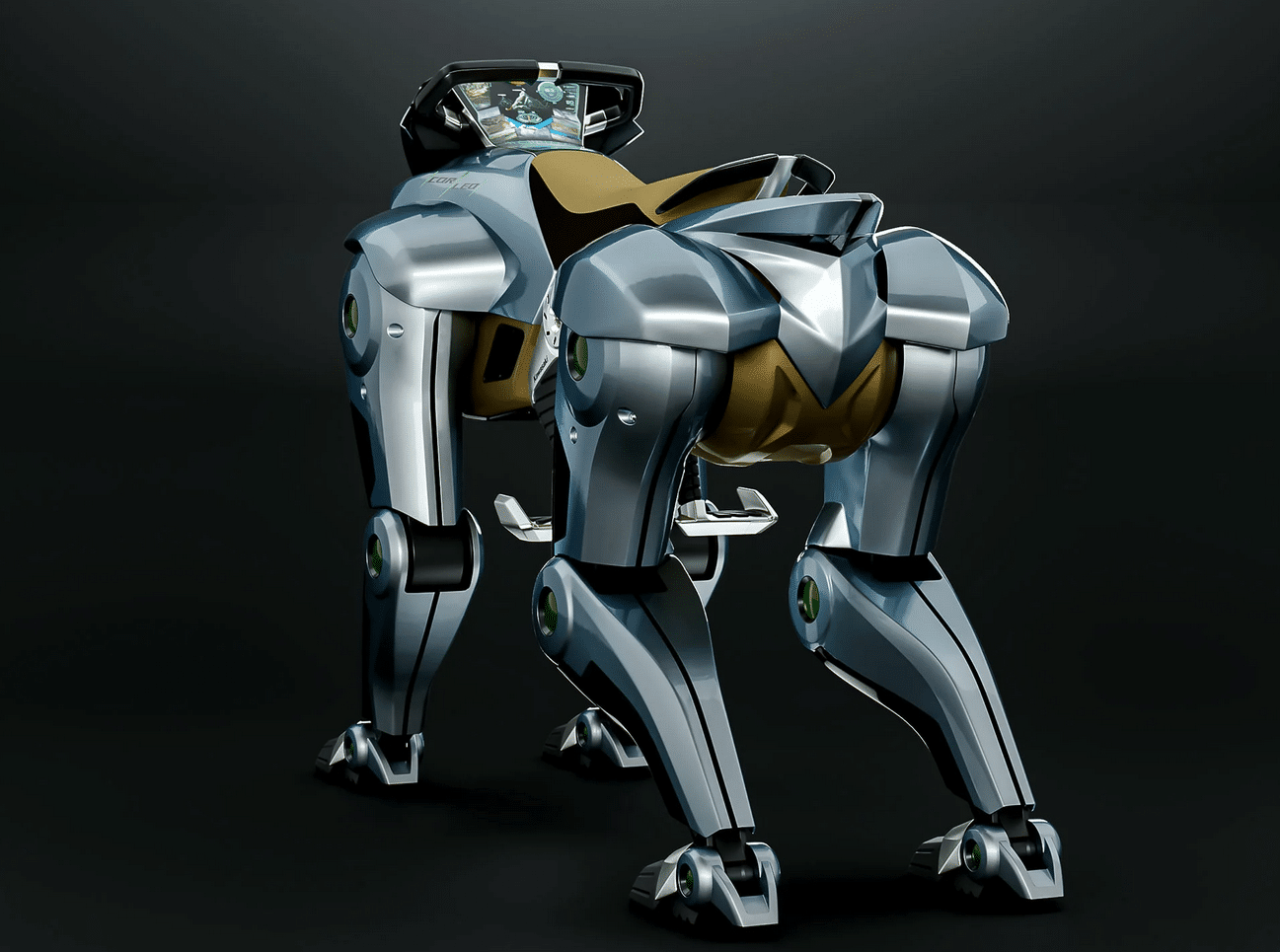
Kawasaki Heavy Industries hat mit dem Konzeptfahrzeug Corleo ein außergewöhnliches Mobilitätskonzept vorgestellt, das sich bewusst von traditionellen Fortbewegungsmitteln abgrenzt. Statt Rädern stehen vier Beine zur Verfügung – und statt Benzin treibt ein Wasserstoffbetriebener Viertaktmotor den Roboter an, der sich wie ein Löwe bewegt und wie ein Pferd geritten werden kann. Die Präsentation kurz vor der Weltausstellung Expo 2025 in Osaka ließ trotz vieler Fragezeichen aufhorchen.
Biomechanik auf vier Beinen
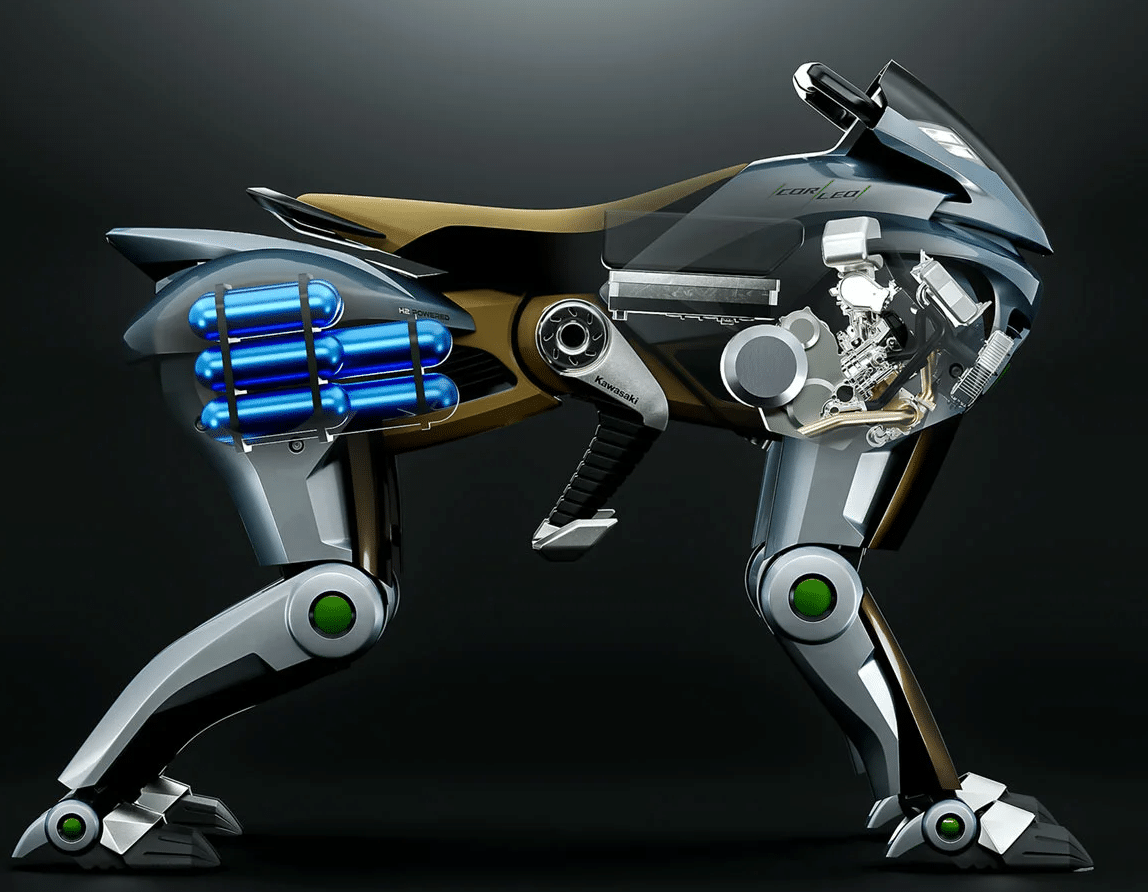
Mit einer Länge von 1,70 Metern und einer Schulterhöhe von 1,60 Metern entspricht Corleo in etwa der Größe eines Quads. Im Gegensatz zu herkömmlichen Fahrzeugen basiert die Fortbewegung jedoch vollständig auf einem vierbeinigen Antriebssystem mit elektrisch betriebenen Gliedmaßen. Die Energie wird durch einen 150-ccm-Wasserstoffmotor erzeugt, der ausschließlich Strom liefert – eine Brennstoffzelle ist nicht verbaut. Ob ein Akku als Zwischenspeicher fungiert, wurde bislang nicht näher erläutert.
Das Design greift auf tierische Bewegungsmuster zurück – insbesondere von Wölfen, Hirschen und Raubkatzen. Die Bewegungsfreiheit der Beine erlaubt theoretisch Sprünge über Felsen, das Überqueren unebenen Terrains und eine Geschwindigkeit von bis zu 100 km/h – zumindest laut Konzept.
Steuerung durch Körperbalance statt Lenker
Unkonventionell ist auch die Bedienung: Gesteuert wird der Roboter nicht durch einen Lenker oder Pedale, sondern durch Gewichtsverlagerung des Reiters. Das erfordert ein gewisses Maß an Balancegefühl, soll aber durch eine künstliche Intelligenz unterstützt werden, die permanent das Gelände analysiert und passende Bewegungsmuster wählt. Gummierte „Hufe“ sorgen für Haftung auf unterschiedlichem Untergrund.
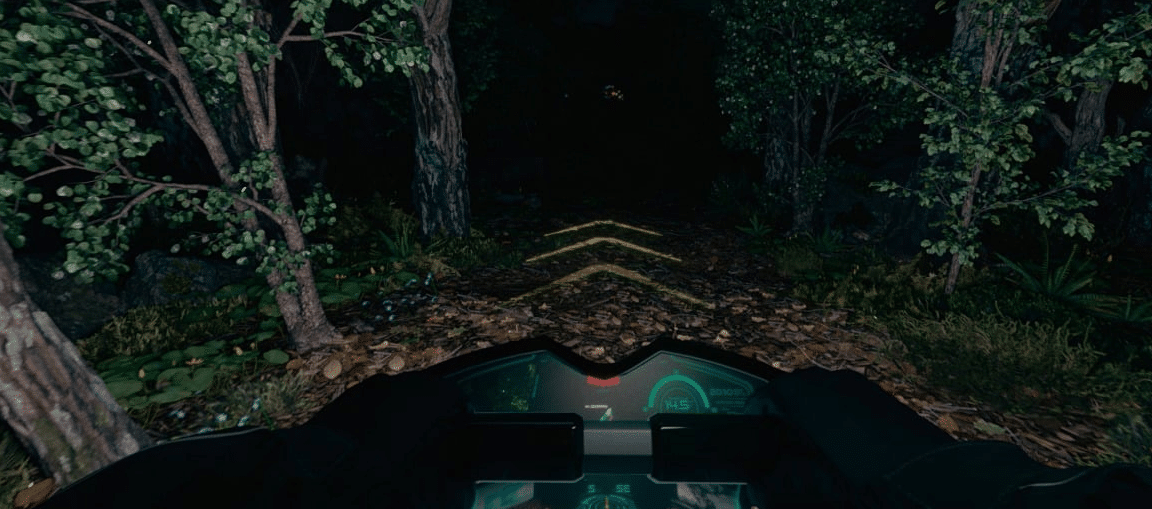
Der Sitz ist auf zwei Personen ausgelegt, federt unabhängig vom Hauptkörper und ist mit beweglichen Fußrasten ausgestattet, die auch Steuersignale erfassen. Diese Anordnung soll die Erschütterungen bei schneller Bewegung dämpfen und an Motorradfahrwerke erinnern. Unterstützt wird der Fahrer durch ein digitales Cockpit mit Head-up-Display, das Informationen zu Wasserstoffstand, Navigation und Systemstatus anzeigt.
Zwischen Konzept und Realität
Der präsentierte Corleo wirkt bislang vor allem wie ein Design- und Technologiedemonstrator. Die gezeigten Videoaufnahmen basieren weitgehend auf computergenerierten Animationen, und der physisch ausgestellte Prototyp auf der Expo gilt offiziell als nicht funktionsfähig. Das tatsächliche Bewegungsvermögen des Roboters ist derzeit nicht bekannt – der gezeigte „Sprung über eine Gletscherspalte“ bleibt reine Spekulation.
Kawasaki nennt das Jahr 2050 als groben Zielkorridor für eine mögliche Umsetzung – falls sich die Technologie bis dahin als praktikabel erweist. Technische Herausforderungen bleiben: etwa Energieeffizienz bei hohen Geschwindigkeiten, Federung bei vierbeiniger Bewegung, oder die Sicherheitskoordination für Reiter und Beifahrer bei autonomer Steuerung.
Einschätzung
Mit dem Corleo zeigt Kawasaki eine interessante Zukunftsvision, die irgendwo zwischen Motorrad, Roboter und Reittier angesiedelt ist. Die Kombination aus alternativem Antrieb, Tierbewegungsmechanik und interaktivem Fahrerlebnis mag auf den ersten Blick futuristisch wirken, konfrontiert sich aber mit einer Vielzahl technischer und ergonomischer Herausforderungen.
Wie realistisch ist ein vierbeiniger, reitbarer Roboter für Gelände und Straße wirklich? Könnte ein solches System in entlegenen Gebieten oder bei Rettungseinsätzen sinnvoll sein – oder bleibt es eine technikverliebte Utopie?

Mel
11.04.2025, 19:08hey Kay
bitte halt uns auf'm laufenden!!!
Little0358
13.04.2025, 15:22Wäre geil wenn ihr den Löwen mal testen dürftet
lg Hermann aus Österreich